3) Présentation du travail à réaliser :
Mon projet consiste en la réalisation dun système de mesure automatisé.
Ce projet est basé sur une note , de Hewlett Packard, intitulée Antenna Measurements using HP 8753C Network Analyser (voir annexe 1). Cette documentation explique le principe de fonctionnement dun système de mesure automatique des caractéristiques dantennes, ceci en utilisant un analyseur de réseau HP, un logiciel HP spécialisé et le système mécanique de positionnement de lantenne .
Ce système étant trop coûteux pour lutilisation qui doit en être fait, il ma donc été demandé de réaliser un système semblable, mais à moindre coût.
Le système de mesure manuelle est déjà existant, mais reste trop onéreux et imprécis, on cherche donc par cette automatisation du processus, à gagner en précision et en rapidité.
Le système existant :
Le système existant est constitué dune table avec un poteau métallique, sur lequel est fixée lantenne à tester, dun analyseur de réseau HP 8714B et dune antenne dont on connaît les caractéristiques exactes .
Lantenne à tester est connectée à lentrée de lanalyseur de réseau et lantenne connue est connectée à la sortie de lanalyseur.
Lanalyseur de réseau est paramétré de telle sorte à tester lantenne en réception.
Le système est alors le suivant :
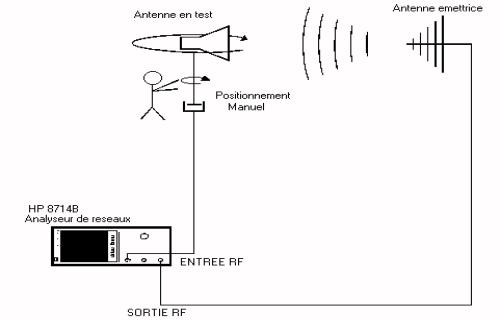
Lanalyseur de réseau nous donne alors le gain de lantenne, on la fait tourner à la main, en se référant à une échelle graduée de 0 à 360 degrés. On prend ainsi des mesures à différentes positions de lantenne et on dresse un tableau indiquant le gain en fonction de langle.
A partir de cela, on peut alors tracer le gabarit de lantenne, tel que sur la figure suivante :
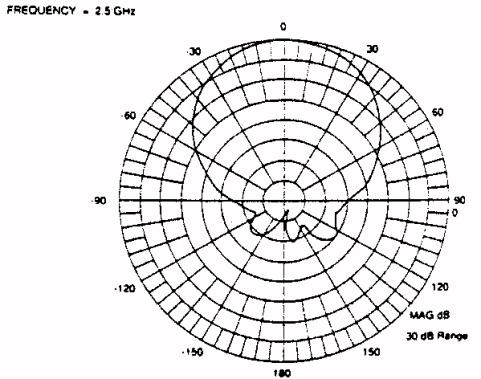
(antenne unidirectionnelle)
Le système à concevoir :
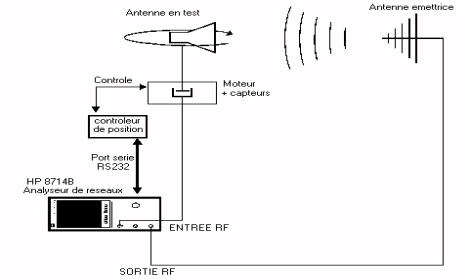
Lobjectif de mon projet est de réaliser un système permettant de remplacer le positionnement manuel de lantenne, par un système de positionnement automatique.
Il faudra quà partir de lanalyseur de réseau on soit capable de commander le positionnement de lantenne et denregistrer le gain pour les différentes positions, ceci afin dobtenir un fichier au format texte contenant les résultats des mesures.
Le schéma de principe est alors le suivant :
Le fichier texte devra être du type :
Angle Mesure
0 -103.1
45 -98.2
90 -117.3
135 -95.6
180 -106.4
225 -108.5
270 -98.3
315 -100.6
359 -113.1
Cette notation va nous permettre de traiter les résultats à laide dExcel, par exemple en traçant le graphique correspondant.
Dans un soucis déconomie, on ma demandé dessayer dans la limite du possible, d utiliser des composants étants disponibles au magasin ou récupéré sur danciennes machines. Dans cette perspective de coût minimal, jai décidé de limiter au maximum le nombre de composants nécessaires à la réalisation du projet, rendant le système dautant plus adaptable à dautres fonctions et de maintenance plus aisée.
4) Choix des composants à utiliser :
Choix du moteur :
Le choix du moteur cest fait selon les critères suivants :
- le couple moteur
- la précision de positionnement
- la vitesse de rotation.
En effet, pour lutilisation que lon veut en faire, il faut que le moteur ait une vitesse de rotation suffisamment lente pour ne pas risquer de blesser quelquun lors de la rotation de lantenne, et cela est également important pour la précision de positionnement.
Il faut veiller également à ce que le couple moteur soit suffisant pour faire tourner lantenne, qui est tout de même assez lourde.
Aux vues des moteurs disponibles au magasin, lidée dutiliser un moteur pas à pas a vite été écartée, car les models disponible navais visiblement pas un couple suffisant pour faire tourner lantenne.
Nous nous sommes donc tourné vers des modèles de moteurs à courant continu.
Le modèle retenu est équipé dun réducteur, ce qui lui permet davoir un couple élevé pour une vitesse de rotation assez faible. Cest un modèle de chez Brevel Motors inc. ayant une tension de fonctionnement de 36 VDC.
Choix du capteur de position :
Au niveau du capteur le choix a était facile, étant donné quil ny en avait quun seul model disponible. Il sagit dun encodeur optique, cest a dire quil fonctionne à base dune led, dun phototransistor et dun disque contenant une multitude de trous.
La led est dun coté du disque et le phototransistor de lautre coté, ainsi à chaque passage dun trou le phototransistor voit la led, alors il conduit et quand il ny a pas de trou il ne conduit plus. Ainsi la rotation de laxe du capteur génère des impulsions en sortie du phototransistor.
Malheureusement, la documentation restant introuvable, il a était impossible den connaître les caractéristiques exactes, elles seront déterminées expérimentalement par la suite.
Choix du contrôleur de position :
Comme déjà dit précédemment, on cherche à limiter au maximum la complexité de la partie hardware du système en limitant le nombre de composants, et on veut que le système de contrôle du moteur soit facilement réadaptable pour dautres utilisations.
Il faut donc dans ce cas sorienter vers lutilisation dune carte à micro-contrôleur, qui soit en plus équipée dun port de communication série RS232.
Nous avons choisi pour cela une carte à micro-contrôleur MC68HC811E2, de Motorola, réalisée au collège.
La carte est la suivante :
(malheureusement le schéma reste introuvable)
Le MC68HC811E2 à une ROM de 2k, ce qui nous semble largement suffisant, et il est muni dun convertisseur Analogique Numérique sur 8 bits, dun port de communication série et parallèle, dun pulse accumulator, dun real time counter, dun port bis directionnel et dun port de sortie. Cela nous permettra de réaliser toutes les fonctions nécessaires à la commande du moteur et des capteurs.
Choix du capteur de fin/début de course :
Afin de détecter la position exacte de lantenne, il nous faut initialiser sa position au départ, cest pour cela quil nous faut utiliser un capteur afin de détecter son initialisation et au cas où, son dépassement de position.
Plutôt que dutiliser un détecteur de fin de course mécanique, nous avons choisi dutiliser un capteur infrarouge, ce qui permet de navoir aucun contacts entre le capteur et laxe de lantenne, évitant ainsi les frottements et donc lusure du capteur.
La référence est OPB665T (voir annexe1) , cest un capteur en forme de U et intégrant un amplificateur, ce qui permet davoir des états logiques TTL en sortie.
Choix du système de commande de puissance du moteur :
Des essais ont été effectués afin de choisir un composant capable de commander le moteur de manière appropriée.
Le premier circuit testé a été un LMD18245, une version de pont en H intégrant son propre générateur de PWM, codé sur 4 bits. Mais il est apparu peu utile davoir ce codeur intégré au composant étant donné que le MC68HC811E2 est capable de générer directement le PWM, de plus la résolution sest avérée insuffisante pour notre application.
Nous avons préféré utiliser un circuit du même type, mais nintégrant pas le codeur 4 bits et coûtant alors moins cher.
Le circuit retenu est un LMD18200, un pont en H supportant 3 A sous 55v
(voir annexe2).
Il permet de faire varier la vitesse du moteur CC en appliquant sur son entrée un signal PWM , dont on fait varier le rapport cyclique.
On peut changer le sens de rotation, ainsi que mesurer le courant absorbé par le moteur.
Dans un souci dadaptabilité pour dautres applications futures, jai décidé dutiliser toutes les options quoffre ce composant, seul le frein na pas été utilisé, car jugé inutile.